พื้นฐานหุ่นยนต์ในงานอุตสาหกรรม ฉบับผู้ใช้งาน
ในปัจจุบันภาคอุตสาหกรรมการผลิต มีการแข่งขันที่เพิ่มขึ้น การเกิดตลาดใหม่ การเพิ่มขึ้นของคู่แข่งในภูมิภาค และประเทศคู่แข่งทางการผลิตที่มีความพร้อมของค่าจ้างแรงงาน สร้างผลกระทบต่อผู้รับจ้างผลิตของไทย ทั้งด้านต้นทุน คุณภาพ และความสามารถในการผลิต ซึ่งทำให้รูปแบบการผลิตที่ใช้กันอยู่ในปัจจุบันนี้ มีความจำเป็นต้องปรับเปลี่ยน เพื่อเพิ่มความสามารถการแข่งขันกับคู่แข่งในระดับภูมิภาคและระดับโลก และสายการผลิตแบบอัตโนมัตินั้นได้มีการใช้งานกันในระบบการผลิตของภาคอุตสาหกรรมเป็นปกติอยู่แล้ว แต่มักเป็นผู้ประกอบการขนาดใหญ่หรือมาจากการย้ายฐานหรือเทคโนโลยีการผลิตแบบอัตโนมัติมาพร้อมกับการเริ่มต้นธุรกิจ


นอกจากเทคโนโลยีอัตโนมัติแล้ว หุ่นยนต์อุตสาหกรรมถือเป็นส่วนหนึ่งของการใช้ระบบอัตโนมัติเพื่อการผลิต และเป็นหนึ่งในวิธีการเพิ่มความสามารถในการผลิต ซึ่งปัจจุบันผู้ประกอบการผลิตในภาคอุตสาหกรรมให้ความสนใจในการปรับเปลี่ยนระบบอัตโนมัติเดิมมาเป็นการใช้หุ่นยนต์อุตสาหกรรมเป็นหนึ่งในสายการผลิต ซึ่งจากการคาดการณ์ ของ IFR (International Federation of Robotics) ยอดขายหุ่นยนต์ทั่วโลกจะเพิ่มขึ้น 6% โดยเฉลี่ยต่อปี จาก ปี พ.ศ.2557 ถึง ปี พ.ศ. 2559 และในปีต่อๆ ไปอย่างต่อเนื่อง และนั่นหมายความว่าหุ่นยนต์อุตสาหกรรมจะเริ่มเข้ามามีบทบาทเป็นอย่างมากในกระบวนการผลิต เราในฐานะแรงงานที่ต้องรับผลกระทบโดยตรงจึงต้องมีการปรับเปลี่ยนวิธีการให้สอดคล้องกับการเปลี่ยนแปลงที่จะเกิดขึ้นในอนาคตด้วย และเพื่อเป็นการเตรียมความพร้อมต่อการเปลี่ยนแปลงที่จะเกิดขึ้น ผู้เขียนจึงขอนำเสนอข้อมูลความรู้ขึ้นพื้นฐานเกี่ยวกับหุนยนต์ในงานอุตสาหกรมเพื่อให้ทุกท่านได้เข้าใจและสามารถประยุกต์ใช้งานได้อย่างมีประสิทธิภาพ



 โครงสร้างของหุ่นยนต์สำหรับงานอุตสาหกรรมจะประกอบไปด้วยส่วนประกอบหลัก 2 ส่วน คือ ส่วนที่เป็นแทนแขน หรือ Link และส่วนที่เป็นข้อต่อ หรือ Joint ซึ่งส่วนประกอบทั้งสองส่วนนี้จะเป็นส่วนประกอบที่จะต้องทำงานตามคำสั่งที่ User ได้ทำการโปรแกรมไว้ ดังนั้น การที่จะทำการควบคุมหรือโปแกรมการทำงานของหุ่นยนต์ให้เกิดการเคลื่อนที่ได้นั้นก็จำเป็นที่จะต้องมีองค์ประกอบอื่นเข้ามาเกี่ยวข้องกับการโปรแกรมการทำงานของหุ่นยนต์ด้วย ดังที่ได้กล่าวมาแล้วว่าหุ่นยนต์นั้นก็คือเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่นำมาประยุกต์ให้สามารถทำงานทดแทนแรงงานคน ดังนั้น เมื่อเป็นเครื่องจักรกลอัตโนมัติก็หมายความว่าเราสามารถที่จะโปรแกรมการทำงานให้สามารถทำงานได้อย่างต่อเนื่องนั่นเอง โดยปกติแล้วเครื่องจักรกลอัตโนมัติทุกรูปแบบจะมีองค์ประกอบที่สำคัญอยู่ 3 ส่วน คือ
โครงสร้างของหุ่นยนต์สำหรับงานอุตสาหกรรมจะประกอบไปด้วยส่วนประกอบหลัก 2 ส่วน คือ ส่วนที่เป็นแทนแขน หรือ Link และส่วนที่เป็นข้อต่อ หรือ Joint ซึ่งส่วนประกอบทั้งสองส่วนนี้จะเป็นส่วนประกอบที่จะต้องทำงานตามคำสั่งที่ User ได้ทำการโปรแกรมไว้ ดังนั้น การที่จะทำการควบคุมหรือโปแกรมการทำงานของหุ่นยนต์ให้เกิดการเคลื่อนที่ได้นั้นก็จำเป็นที่จะต้องมีองค์ประกอบอื่นเข้ามาเกี่ยวข้องกับการโปรแกรมการทำงานของหุ่นยนต์ด้วย ดังที่ได้กล่าวมาแล้วว่าหุ่นยนต์นั้นก็คือเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่นำมาประยุกต์ให้สามารถทำงานทดแทนแรงงานคน ดังนั้น เมื่อเป็นเครื่องจักรกลอัตโนมัติก็หมายความว่าเราสามารถที่จะโปรแกรมการทำงานให้สามารถทำงานได้อย่างต่อเนื่องนั่นเอง โดยปกติแล้วเครื่องจักรกลอัตโนมัติทุกรูปแบบจะมีองค์ประกอบที่สำคัญอยู่ 3 ส่วน คือ

รายละเอียดเบื้องต้นบนอุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์

สถานการณ์ปัจจุบันกับการเปลี่ยนแปลง
ในปัจจุบันระบบการผลิตแบบอัตโนมัติได้มีการพัฒนาเพิ่มประสิทธิภาพ และมีราคาที่ผู้ประกอบการผลิตอุตสาหกรรม ขนาดกลางและเล็กสามารถเข้าถึงและใช้งานได้ และมีโซลูชั่นมากมายหลายรูปแบบ แต่การเลือกระบบอัตโนมัติ มิได้พิจารณาเฉพาะด้านต้นทุน คุณภาพ และความสามารถในการผลิต ยังมีปัจจัยเรื่องความยากง่ายในการใช้งาน การอัพเกรด การซ่อมบำรุง การใช้พลังงาน ตัวบุคลากรผู้ใช้งาน ทำให้ผู้ใช้งาน เกิดความยากในการตัดสินใจเลือกใช้งาน และกังวลต่อประสิทธิภาพ หรืออาจมองไม่ครอบคลุม การพิจารณาที่ราคาต่ำอย่างเดียวจึงกลายเป็นอุปสรรคในการแข่งขันเพราะระบบที่เลือกไม่เหมาะสม

นอกจากเทคโนโลยีอัตโนมัติแล้ว หุ่นยนต์อุตสาหกรรมถือเป็นส่วนหนึ่งของการใช้ระบบอัตโนมัติเพื่อการผลิต และเป็นหนึ่งในวิธีการเพิ่มความสามารถในการผลิต ซึ่งปัจจุบันผู้ประกอบการผลิตในภาคอุตสาหกรรมให้ความสนใจในการปรับเปลี่ยนระบบอัตโนมัติเดิมมาเป็นการใช้หุ่นยนต์อุตสาหกรรมเป็นหนึ่งในสายการผลิต ซึ่งจากการคาดการณ์ ของ IFR (International Federation of Robotics) ยอดขายหุ่นยนต์ทั่วโลกจะเพิ่มขึ้น 6% โดยเฉลี่ยต่อปี จาก ปี พ.ศ.2557 ถึง ปี พ.ศ. 2559 และในปีต่อๆ ไปอย่างต่อเนื่อง และนั่นหมายความว่าหุ่นยนต์อุตสาหกรรมจะเริ่มเข้ามามีบทบาทเป็นอย่างมากในกระบวนการผลิต เราในฐานะแรงงานที่ต้องรับผลกระทบโดยตรงจึงต้องมีการปรับเปลี่ยนวิธีการให้สอดคล้องกับการเปลี่ยนแปลงที่จะเกิดขึ้นในอนาคตด้วย และเพื่อเป็นการเตรียมความพร้อมต่อการเปลี่ยนแปลงที่จะเกิดขึ้น ผู้เขียนจึงขอนำเสนอข้อมูลความรู้ขึ้นพื้นฐานเกี่ยวกับหุนยนต์ในงานอุตสาหกรมเพื่อให้ทุกท่านได้เข้าใจและสามารถประยุกต์ใช้งานได้อย่างมีประสิทธิภาพ
หุ่นยนต์ในงานอุตสาหกรรม เป็นเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่ถูกออกแบบและสร้างมาเพื่อนำมาใช้ทดแทนคนในกระบวนการผลิตต่างๆ หรือนำมาใช้เพื่อช่วยในกระบวนการผลิตในลักษณะหุ่นยนต์ทำงานร่วมกับคน ซึ่งหุ่นยนต์ที่ถูกสร้างมานั้นมีหลากหลายชนิดขึ้นอยู่กับลักษณะของงานที่ต้องการนำมาประยุกต์ใช้งาน สำหรับหุ่นยนต์ในงานอุตสาหกรรมนั้นสามารถแบ่งออกได้ ตามลักษณะการทำงาน ได้ 7 ชนิด ดังนี้
- Cartesian Robot
- Cylindrical Robot
- Polar Coordinate Robot
- Scalar Robot
- Articulate Robot
- Spine Robot
- Parallel link Robot
หุ่นยนต์อุตสาหกรรมทั้ง 7 ชนิดที่กล่าวมาข้างต้นนั้น จะมีความแตกต่างกันตรงลักษณะการเคลื่อนที่และความสามารถในการทำงานที่ไม่เหมือนกัน รวมไปถึงการประยุกต์ใช้งานที่ต่างกันด้วยแต่ทั้งหมดถูกสร้างขึ้นมาด้วยหลักการพื้นฐานเดียวกัน ในที่นี้ผู้เขียนจะขอกล่าวถึงเฉพาะส่วนของหุ่นยนต์ที่ถูกนำมาประยุกต์ใช้งานในภาคอุตสาหกรรมมากที่สุด นั่นคือ Articulate Robot อันเนื่องมาจากหุ่นยนต์ชนิดนี้มีความสามารถในการทำงานและสามารถนำมาประยุกต์ใช้ในงานอุตสาหกรรมได้หลากหลายรูปแบบมากกว่าขนิดอื่นๆ นั่นเอง
Articulate Robot เป็นหุ่นยนต์ที่ออกแบบมาให้มีลักษณะคล้ายคลึงกับแขนของมนุษย์ตั้งแต่ช่วงหัวไหล่ไหลลงไป นั้นหมายความว่าหุ่นยนต์ชนิดนี้ จะมีความสามารถในการทำงานและความสามารถในการเคลื่อนที่ได้ในลักษณะที่คล้ายกับการเคลื่อนที่ของแขนมนุษย์นั่นเอง หลายๆ คนจึงมักเรียกหุ่นยนต์ชนิดนี้ว่า ‘แขนกล’
จากรูปที่ 1 ที่แสดงด้านบนนั้นเป็นลักษณะของ Articulate Robot หรือที่เรียกกันว่า แขนกล จะเห็นได้ว่ามีโครงสร้างที่คล้ายคลึงกับของของมนุษย์ ซึ่งนั่นหมายความว่าหุ่นยนต์ชนิดนี้ถูกออกแบบมาเพื่อใช้ในการหยิบจับชิ้นงานในกระบวนการผลิต แต่ในปัจจุบันนี้หุ่นยนต์ชนิดนี้ถูกนำมาประยุกต์ใช้งานให้มีความสามารถมากกว่าทำงานใช้หยิบจับชิ้นงาน ไม่ว่าจะเป็นการประยุกต์ใช้ในกระบวนการงานเชื่อมโลหะต่างๆ งานพ่นสี หรืองาน Spot Gun และบางองค์กรยังมีการพัฒนาให้หุ่นยนต์ชนิดนี้สามารถทำงานในกระบวน Machining อีกด้วย จากตัวอย่างการประยุกต์ใช้งานข้างต้น จะเห็นได้ว่าหุ่นยนต์จะถูกนำมาใช้งานทดคนนั่นเป็นเรื่องจริงเลยทีเดียว ข้อดีของการใช้หุ่นยนต์เพื่อนำมาทำงานทดแทนคนก็เพราะหุ่นยนต์มีสิ่งที่ไม่เหมือนคน ดังนี้
- หุ่นยนต์มีความแม่นยำและความเที่ยงตรงในการทำงาน
- หุ่นยนต์มีความสามารถในการทำงานในกระบวนซ้ำๆ ได้ดีกว่า
- หุ่นยนต์สามารถปรับเปลี่ยนรูปแบบกระบวนการทำงานได้หลากหลาย
- หุ่นยนต์สามารถประยุกต์ใช้งานได้ในหลากหลายสภาพแวดล้
จากเหตุผลที่กล่าวมาข้างต้นล้วนเป็นข้อดีของหุ่นยนต์ที่จะถูกนำมาใช้งานทดแทนคน แต่ก็ไม่ได้หมายความว่ามันจะดีไม่กว่าคนเสียทั้งหมด แน่นอนว่าหุ่นยนต์ก็คือเหล็กที่ถูกนำมาประกอบเข้าด้วยกันและใส่กลไกต่างๆ ให้สามารถเคลื่อนที่ได้ อีกทั้ง ยังต้องมีระบบในการควบคุบการทำงานดังนั้นการที่หุ่นยนต์จะทำงานหรือเคลื่อนที่ได้จะต้องอาศัยทักษะและความรู้จากคนอยู่ดีทั้งนี้เพื่อทำหน้าที่ในการป้อนโปรแกรมคำสั่งต่างๆ เพื่อให้หุ่นยนต์สามารถทำงานได้ตามที่มนุษย์ต้องการ เราจึงต้องมีการเตรียมพร้อมเพื่อให้ทันต่อการเปลี่ยนแปลงที่จะเกิดขึ้น
องค์ประกอบของระบบควบคุมหุ่นยนต์
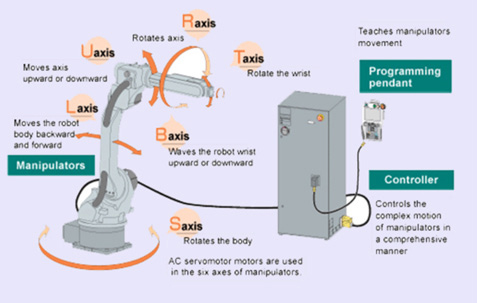
ในตอนแรกนี้ผู้เขียนขอทิ้งท้าย ให้ทุกท่านทราบเกี่ยวกับองค์ประกอบของระบบควบคุมหุ่นยนต์กันไว้เพื่อที่จะได้เตรียมความพร้อมในเรื่องต่อไปในตอนหน้า สำหรับองค์ประกอบของระบบในการควบคุมหุ่นยนต์ประกอบด้วย องค์ประกอบหลัก คือ
- Programming Pendent : อุปกรณ์ที่ทำหน้าที่ในการป้อนคำสั่งโดยผู้ควบคุมหรือ User
- Controller : ส่วนที่ทำหน้าที่ในการรับคำสั่งจาก User ผ่าน Programming Pendant และนำมาประมาณผล เพื่อทำการควบคุมหรือสั่งการทำงานของหุ่นยนต์
- Manipulator : เรียกง่ายๆ ว่า ตัวหุ่นยนต์ ที่จะทำงานตามคำสั่งที่ผ่านการประมวลผลจาก Controller
รูปที่ 2 : องค์ประกอบของระบบควบคุมหุ่นยนต์
จากรูปที่ 2 ที่แสดงด้านบนนั้นเป็นองค์ประกอบของระบบควบคุมหุ่นยนต์ ซึ่งจะมีอยู่ด้วยกัน 3 ส่วนหลัก และจะเห็นได้ว่าองค์ประกอบทั้ง 3 นั้น จะมีความสัมพันธ์กันในกระบวนการควบคุมซึ่งในแต่ละส่วนนั้นก็มีรายละเอียดที่สลับซับซ้อนอยู่มากทีเดียวและนี่จึงเป็นเหตุผลที่เราต้องทำความรู้จักกับมันให้มากเพื่อที่จะได้สามารถทำงานร่วมกับมันได้
เมื่อได้รู้เรื่องเรื่องราวของสถานการณ์ในปัจจุบันและผลกระทบที่จะเกิดขึ้นกับตัวเราเองแล้ว คราวนี้เราคงจะต้องมาเรียนรู้กันต่อไป รายละเอียดต่างๆ ของระบบการควบคุมหุ่นยนต์อุตสาหกรรมนั้นจะมีอะไรบ้าง ในตอนหน้าผู้เขียนจะมานำเสนอให้ทุกท่านได้รู้จักกับรายละเอียดโครงสร้างของหุ่นยนต์และลักษณะการเคลื่อนของหุ่นยนต์กันต่อ ซึ่งถือว่าเป็นเรื่องที่สำคัญเลยทำเดียวที่จะทำให้เราสามารถโปรแกรมหุ่นยนต์ได้
โครงสร้างตัวหุ่นยนต์ (Robot Structure)
จากตอนที่แล้วผมได้เกริ่นนำเกี่ยวกับเรื่องของระบบหุ่นยนต์อุตสาหกรรมให้กับทุกๆ ท่านทราบแล้วนะครับว่าสถานการณ์ในปัจจุบันนั้นกำลังมีการเปลี่ยนแปลงไปอย่างมาก การปรับตัวของภาคอุตสาหกรรมการผลิตเองก็ต้องมีการปรับตัวเพื่อให้สามารถแข่งขันได้ในตลาดธุรกิจ หุ่นยนต์อุตสาหกรรมที่นำมาช่วยในกระบวนการผลิตจึงเป็นอีกหนึ่งเทคโนโลยีเครื่องจักกลอัตโนมัติที่สำคัญเลยทีเดียว และในตอนที่ 2 จะเป็นการแนะนำให้ทุกท่านได้รู้จักกับหุ่นยนต์ในงานอุตสาหกรรมมากยิ่งขึ้น เพื่อเตรียมความพร้อมก่อนที่จะสามารถโปรแกรมการทำงานของมันได้ นั่นก็คือ โครงสร้างของตัวหุ่นยนต์และลักษณะการเคลื่อนที่ของหุ่นยนต์นั่นเอง ทั้งนี้ จากที่ทุกท่านทราบกันแล้วนะครับว่าองค์ประกอบของระบบการควบคุมหุ่นยนต์พื้นฐานนั้นจะมีอยู่ด้วยกัน 3 ส่วน ประกอบด้วย
- ตัวหุ่น หรือ Robot Boy หรือ Manipulator
- อุปกรณ์ควบคุมหุ่นและโปรแกรหุ่น(ProgrammingPendent)
- Controller & Amplifier Set
องค์ประกอบทั้ง 3 ส่วนที่กล่าวมาข้างต้นนั้นเรียกได้ว่าเป็นสิ่งที่สำคัญมาก เพราะเนื่องจากการควบคุมการทำงานของหุ่นยนต์หรือการโปรแกรมหุ่นยนต์ให้สามารถทำงานได้นั้น จะต้องมีความรู้ในข้อมูลที่เกี่ยวกับรายละเอียดที่สำคัญของตัวหุ่นยนต์ด้วยจึงจะสามารถโปรแกรมหุ่นยนต์ได้อย่างถูกต้อง สำหรับตอนนี้จะขอกล่าวถึงรายละเอียดในส่วนขององค์ประกอบตัวแรก คือ ‘ตัวหุ่นยนต์’
โครงสร้างตัวหุ่นยนต์
ตัวหุ่นยนต์ (Robot Body / Manipulator) เป็นส่วนที่สำคัญที่สุด เพราะเวลาที่เราจะพิจารณาเลือกใช้หุ่นยนต์สักตัวเพื่อทำมาใช้ช่วยในกระบวนการผลิตจะต้องคำนึงถึงลักษณะของงาน พื้นที่ สิ่งแวดล้อม เนื่องจากตัวหุ่นยนต์นั้นเป็นส่วนที่ต้องนำมาใช้ในกระบวนการทำงานอยู่ตลอดเวลา ซึ่งลักษณะงานที่แตกต่างกันก็จะเป็นตัวบ่งบอกในเรื่องของขนาดโครงสร้างของตัวหุ่นยนต์ด้วย ซึ่งตรงนี้หลายๆ ท่านอาจนึกภาพออก ซึ่งถ้าเปรียบเทียบกับคน หากคนที่ตัวเล็กอาจยกของได้น้อยกว่าคนตัวใหญ่นั่นเอง ดังนั้น เราจึงต้องมาศึกษาให้เข้าใจเกี่ยวกับโครงสร้างของตัวหุ่นยนต์ก่อนว่าประกอบไปด้วยอะไรบ้าง เพราะหากเราไม่ทราบเราก็จะไม่สามารถโปรแกรมหุ่นยนต์ให้ทำงานได้ ที่สำคัญ คือ เราจะคุยกับคนอื่นไม่รู้เรื่องอีกด้วย
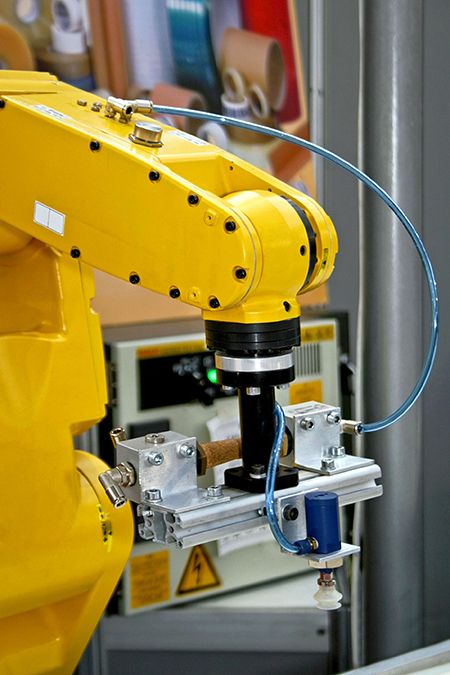
รูปที่ 1 : ตัวหุ่นยนต์ยี่ห้อต่างๆ
จากภาพด้านบนเป็นภาพแสดงให้เห็นถึงตัวอย่างของตัวหุ่นยนต์ (Robot Body) ยี่ห้อต่างๆ ในตลาดหุ่นยนต์ จะเห็นได้ว่าถึงแม้จะต่างยี่ห้อกัน แต่ลักษณะของโครงสร้างจะมีลักษณะโครงสร้างที่เหมือนกัน ความแตกต่างจะอยู่ที่ลักษณะของการ Design เท่านั้น โดยโครงสร้างที่สำคัญถูกออกแบบมาจะประกอบด้วยส่วนของท่อนแขนหรือ ‘Link’ และส่วนของข้อต่อหรือ ‘Joint’ และลักษณะโครงสร้างของหุ่นยนต์ทั้ง 2 ส่วนนั้น ยังเป็นตัวกำหนดชนิดของหุ่นยนต์ตามที่กล่าวไว้ในตอนที่ 1 อีกด้วย
Link & Joint
Link & Joint เป็นโครงสร้างหลักของตัวหุ่นยนต์ ซึ่งทั้งสองส่วนนี้จะเป็นส่วนที่เราต้องทำการโปรแกรมให้หุ่นยนต์เกิดการเคลื่อนที่และจะทำงานสัมพันธ์กันตามโปรแกรมที่ User กำหนดไว้
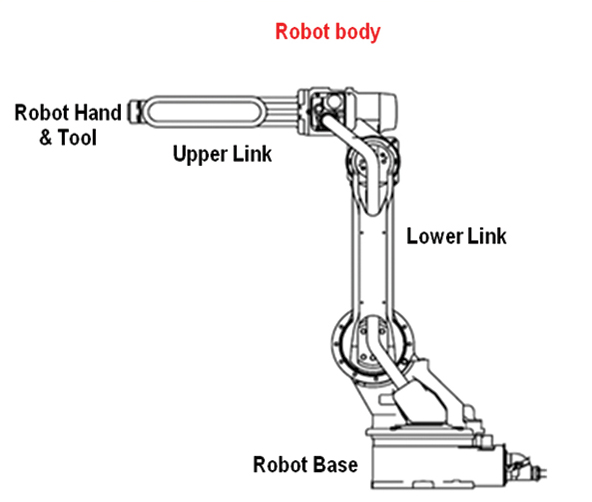
Link คือ โครงสร้างของหุ่นยนต์ที่เป็นท่อนแขน มีหน้าที่ในการเข้าสู่พื้นที่การทำงาน โดยความยาวของ Link จะเป็นตัวบ่งบอกสมรรถนะของตัวหุ่นยนต์ และความสามารถในการเข้าสู่พื้นที่การทำงานด้วย หุ่นยนต์อุตสาหกรรมชนิด Articulate Robot จะมี Link อยู่จำนวน 2 Link ดังนี้
a. Link ท่อนบน หรือ Upper Link เป็นส่วนของท่อนแขนบนสำหรับเข้าสู่พื้นที่การทำงาน และเป็นส่วนที่เชื่อมต่อกับข้อมือ Robot Hand สำหรับติดตั้ง Robot Tool
b. Link ท่อนล่าง หรือ Lower Link เป็นส่วนของท่อนแขนที่ทำหน้าที่ในการรับน้ำหนักทั้งหมดที่เกิดขึ้นของตัวหุ่นทั้งหมดเป็นส่วนที่รองรับน้ำหนักของแขนท่อนบนและเชื่อมต่ออยู่กับฐาน Base ของหุ่นยนต์
รูปที่ 2 : แสดงโครงสร้างของ Link หรือท่อนแขนของตัวหุ่นยนต์
ตามที่ทราบกันในเบื่องต้นแล้วว่าหุ่นยนต์อุตสาหกรรมชนิด Articulate Robot นั้น ถูกออกแบบมาให้มีลักษณะคล้ายกับแขนของมนุษย์ ดังนั้นเพื่อให้ง่ายต่อการทำความเข้าใจเกี่ยวกับเรื่องของ Link ทั้ง 2 ส่วน จึงขอเปรียบเทียบกับแขนของมนุษย์ตามตารางที่ 1
ตารางที่ 1 : ตารางเปรียบเทียบระหว่างโครงสร้าง Link ของหุ่นยนต์และ แขนของมนุษย์
| หุ่นยนต์ | แขนมนุษย์ |
| 1. ฐานหุ่นยนต์ (Robot Base) | 1. ส่วนของเอว |
| 2. แขนท่อนล่าง (Lower Link) | 2. ส่วนของท่อนแขนตั้งแต่หัวไหล่ถึงข้อศอก |
| 3. แขนท่อนบน (Upper Link) | 3. ส่วนของท่อนแขนตั้งแต่ข้อศอกถึงข้อมือ |
| 4. มือหุ่นยนต์ (Robot Hand) | 4. ส่วนตั้งแต่ข้อมือถึงกลางฝ่ามือ |
| 5. เครื่องมือ (Robot Tools) | 5. นิ้วมือ |
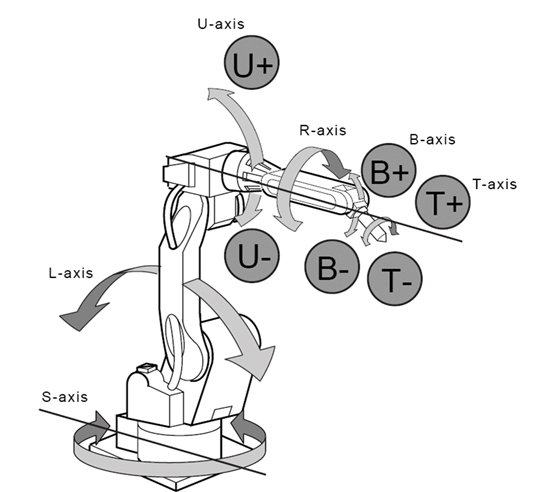
Joint คือ โครงสร้างของหุ่นยนต์ส่วนที่เป็นข้อต่อที่ทำหน้าที่ในการเชื่อมต่อระหว่าง Link ของตัวหุ่นยนต์และยังทำหน้าที่ในการเคลื่อนที่ของตัวหุ่นยนต์ให้สามารถเคลื่อนที่ไปยังตำแหน่งต่างๆ ที่เราต้องการ กล่าวคือ การที่เราทำการโปรแกรมหุ่นยนต์ให้เคลื่อนที่ ก็คือ การโปรแกรมการทำงานของ Joint หรือข้อต่อทั้งหมดของหุ่นยนต์ นั่นหมายความว่า ส่วนของ Joint คือ ส่วนที่ทำการติดตั้ง Servo Motor ไว้นั่นเอง โดยปกติแล้ว หุ่นยนต์อุตสาหกรรมชนิด Articulate Robot จะมีข้อต่อ หรือ Joint ทั้งหมด 6 Joint หรือบางครั้งคนที่อยู่ในวงการการควบคุมหุ่นยนต์ มักเรียกว่าหุ่นยนต์ 6 แกน (6 Axis) ดังแสดงในรูปที่ 3
รูปที่ 3 : ข้อต่อหรือ Joint ของหุ่นยนต์และชื่อเรียก
จากรูปที่ 3 แสดงให้เห็นถึงข้อต่อหรือ Joint ของหุ่นยนต์ซึ่งมีอยู่ด้วยกันทั้งหมด 6 Joint ด้วยกัน โดยมีชื่อเรียกและหน้าที่ของแต่ละ Joint และเปรียบเทียบกับแขนของมนุษย์ได้ตามตารางที่ 2
ตารางที่ 2 : ชื่อเรียกและหน้าที่ของแต่ละ Joint และเปรียบเทียบกับแขนของมนุษย์
| หุ่นยนต์ | เทียบเคียงความหมายกับมนุษย์ | ||
| Axis or Joint No. | Name | Description | |
| Axis 1 or Joint 1 | S | Rotation of the complete manipulator | ส่วนเอวเอว |
| Axis 2 or Joint 2 | L | Forward and reverse movement the lower arm. | ส่วนหัวไหล่ |
| Axis 3 or Joint 3 | U | Vertical movement of the upper arm. | ส่วนข้อศอก |
| Axis 4 or Joint 4 | R | Rotation of the complete wrist centre. | ส่วนหมุนแขนท่อนบนจนถึงข้อมือ |
| Axis 5 or Joint 5 | B | Bending of wrist around the wrist centre. | ส่วนข้อมือ |
| Axis 6 or Joint 6 | T | Rotation of mounting flange(turn disc) | ส่วนหมุนข้อมือ |
จากข้อมูลที่กล่าวมาทั้งหมดทุกท่านอาจจะมองเห็นภาพโครงสร้างของตัวหุ่นยนต์กันแล้วนะครับ ซึ่งเจ้าตัวโครงสร้างของหุ่นยนต์ทั้งสองส่วนที่กล่าวมานั้น มีความสำคัญต่อการโปรแกรมการทำงานของหุ่นยนต์มาก เพราะอย่างที่ได้กล่าวมาแล้วว่าการควบคุมโปรแกรมหุ่นยนต์ ก็คือ การสั่งให้โครงสร้างทั้งสองส่วนนี้เกิดการเคลื่อนที่เพื่อทำงานตามที่เราต้องการนั่นเอง ในตอนหน้าจะนำเสนอให้ทุกท่านได้รู้จักกับองค์ประกอบในระบบควบคุมหุ่นยนต์ที่เหลืออีก 2 ส่วน เพื่อที่จะได้เริ่มเรียนรู้การโปรแกรมเบื้องต้นกันนะครับ โปรดติดตาม สำหรับตอนนี้ขอจบเรื่องราวของโครงสร้างตัวหุ่นยนต์ไว้เท่านี้ ขอบคุณที่ติดตามนะครับ สวัสดีครับ…
โครงสร้างของหุ่นยนต์สำหรับงานอุตสาหกรรมจะประกอบไปด้วยส่วนประกอบหลัก 2 ส่วน คือ ส่วนที่เป็นแทนแขน หรือ Link และส่วนที่เป็นข้อต่อ หรือ Joint ซึ่งส่วนประกอบทั้งสองส่วนนี้จะเป็นส่วนประกอบที่จะต้องทำงานตามคำสั่งที่ User ได้ทำการโปรแกรมไว้ ดังนั้น การที่จะทำการควบคุมหรือโปแกรมการทำงานของหุ่นยนต์ให้เกิดการเคลื่อนที่ได้นั้นก็จำเป็นที่จะต้องมีองค์ประกอบอื่นเข้ามาเกี่ยวข้องกับการโปรแกรมการทำงานของหุ่นยนต์ด้วย ดังที่ได้กล่าวมาแล้วว่าหุ่นยนต์นั้นก็คือเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่นำมาประยุกต์ให้สามารถทำงานทดแทนแรงงานคน ดังนั้น เมื่อเป็นเครื่องจักรกลอัตโนมัติก็หมายความว่าเราสามารถที่จะโปรแกรมการทำงานให้สามารถทำงานได้อย่างต่อเนื่องนั่นเอง โดยปกติแล้วเครื่องจักรกลอัตโนมัติทุกรูปแบบจะมีองค์ประกอบที่สำคัญอยู่ 3 ส่วน คือ- ชิ้นส่วนทางกล (Mechanical Unit)
- ตัวควบคุมการขับเคลื่อน (Drives Unit)
- ชิ้นส่วนควบคุม (Controller Unit)
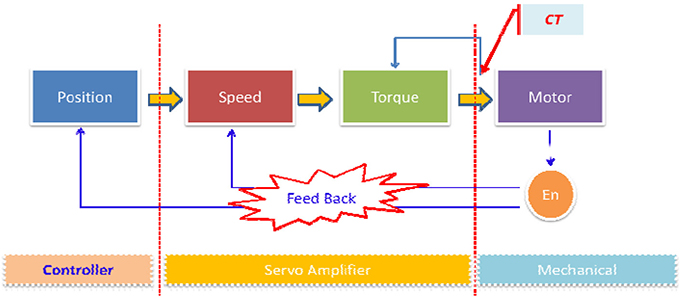
องค์ประกอบของระบบการทำงานในเครื่องจักรกลอัตโนมัติที่กล่าวมาข้างต้นทั้ง 3 ส่วนนั้น เมื่อระบบมีการสั่งให้เกิดการทำงานแล้วจะต้องทำงานในการติดต่อสื่อสารซึ่งกันและกันตลอดเวลา เพื่อให้ระบบสามารถทำงานได้อย่างถูกต้องและมีความแม่นยำ โดยในส่วนของหุ่นยนต์เองก็เช่นเดียวกัน ดังที่แสดงไว้ในรูปที่ 1
รูปที่ 1 : องค์ประกอบของระบบควบคุมเครื่องจักรอัตโนมัติ
จากรูปที่ 1 แสดงให้เห็นองค์ประกอบของระบบการควบคุมเครื่องจักรกลอัตโนมัติรวมไปถึงระบบการควบคุมหุ่นยนต์อัตโนมัติด้วย หุ่นยนต์จำเป็นต้องมีการเคลื่อนที่ ดังนั้น จึงต้องมีมอเตอร์ (Motor) เป็นอุปกรณ์ขับเคลื่อนโดยมอเตอร์นั้นจะอยู่ในส่วนที่เป็น Joint ของหุ่นยนต์นั่นเอง สิ่งที่เราต้องการในการทำงานของหุ่นยนต์นั่นคือ หุ่นยนต์สามารถเคลื่อนที่ได้ โดยสามารถควบคุมความเร็ว(Speed) ของหุ่นยนต์ให้เร็วหรือช้าได้ด้วยการควบคุมมอเตอร์ นอกจากนี้ ตัวหุ่นยนต์เองจะมีน้ำหนักจากอุปกรณ์ประกอบต่างๆ รวมถึงน้ำหนักของ Link บนตัวหุ่นยนต์ น้ำหนักที่เกิดขึ้นก็คือภาระโหลดของตัวมอเตอร์ ดังนั้น มอเตอร์จึงจำเป็นที่จะต้องมีการควบคุมเรื่องของแรงบิด (Torque) เพื่อเอาชนะน้ำหนักและแรงโน้มถ่วงของโลกที่เกิดขึ้นได้ด้วย อีกทั้ง ในเมื่อหุ่นยนต์เคลื่อนที่โดยปกติก็จะต้องมีการหยุดเพื่อทำงานในตำแหน่งต่างๆ ที่ User ต้องการ มอเตอร์จึงต้องมีความแม่นยำในการทำงาน กล่าวคือ มอเตอร์จะต้องสามารถควบคุมตำแหน่ง (Position) เพื่อให้สามารถเคลื่อนจากตำแหน่งหนึ่งไปยังอีกตำแหน่งได้อย่างแม่นยำ มอเตอร์ที่นำมาใช้กับระบบหุ่นยนต์จึงต้องเป็นมอเตอร์ชนิดที่สามารถควบคุมได้นั่นคือ Servo Motor นั่นเอง กล่าวโดยสรุปแล้ว มอเตอร์ (Motor) คือส่วนที่เป็น Mechanical Unit, อุปกรณ์ที่ทำการควบคุมความเร็วและแรงบิด คือ Servo Amplifier หรือ Drives Unit และอุปกรณ์ที่ทำหน้าที่ในการคุมตำแหน่ง (Position) ก็คือส่วนของ Controller Unit และยังมีเอนโค้ดเดอร์ (En : Encoder) เป็นอุปกรณ์ที่ทำหน้าที่ในการตรวจสอบเพื่อทำหน้าที่ในการส่งสัญญาณในการทำงานของมอเตอร์ ให้เกิดความแม่นยำและถูกต้องในลักษณะของการส่งสัญญาณป้อนกลับ (Feed Back) ยังมีระบบการตรวจสอบประมาณกระแส (CT) ที่จ่ายเข้ามอเตอร์เพื่อรักษาความสามารถด้านแรงบิดของมอเตอร์ด้วย
รูปที่ 2 : องค์ประกอบของระบบควบคุมหุ่นยนต์
จากรูปที่ 2 ที่แสดงให้เห็นองค์ประกอบของระบบควมคุมหุ่นยนต์ ซึ่งประกอบด้วย ตัวหุ่น (Manipulator), อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent), คอนโทรลเลอร์ (Controller) ในตอนที่แล้วเราได้รู้จักเกี่ยวกับโครงสร้างของตัวหุ่นไปแล้ว ในตอนนี้เรามาทำการรู้จักกับอุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ หรือ Programming Pendant กันต่อครับ
อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent)
อุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์ (Programming Pendent) เป็นอุปกรณ์ที่สำคัญอีกหนึ่งองค์ประกอบในการควบคุมการทำงานของหุ่นยนต์ อุปกรณ์ตัวนี้จะเป็นส่วนที่ User จะต้องใช้งานอยู่บ่อยครั้งที่สุด โดย Programming Pendant มีไว้สำหรับทำการควบคุมหรือสั่งให้หุ่นยนต์เกิดการเคลื่อนที่ไปยังตำแหน่งต่างๆ ที่เราต้องการ เราไปถึงยังทำหน้าที่ในการเขียนโปรแกรมการทำงานของของหุ่นยนต์ ตรวจสอบโปรแกรม, Start/Stop การทำงานของระบบหุ่นยนต์และยังทำหน้าที่ในการแสดงผลการทำงานต่างๆ ไม่ว่าจะเป็นข้อความ Alarm, สถานะการทำงานของหุ่นยนต์, Cycle Time ,แสดงข้อมูล Parameter ต่างๆ, จัดเก็บหรือสำรองข้อมูลโปรแกรมการทำงานของตัวหุ่น และข้อมูลอื่นๆ ที่เกี่ยวข้องกับการควบคุมหุ่นยนต์อีกมากมาย โดยอุปกรณ์ Programming Pendant นี้จะต้องทำการติดต่อสื่อสารเพื่อส่งและรับข้อมูลต่างๆกับคอนโทรลเลอร์อยู่ตลอดเวลา ทั้งนี้ หุ่นยนต์ทุกตัวจะต้องมีอุปกรณ์ตัวนี้เพื่อความสะดวกในการใช้งาน ในปัจจุบันนี้หน้าตาของ Programming Pendent ก็จะแตกต่างกันออกไปตามยี่ห้อของผู้ผลิตและได้รับการออกแบบมาเพื่อให้สามารถใช้งานได้ง่ายยิ่งขึ้น ดังแสดงในรูปที่ 3
รูปที่ 3 : ตัวอย่าง Programming Pendent
ของหุ่นยนต์ยี่ห้อ Yasakawa
จากรูปที่ 3 เป็นรูปที่แสดงให้เห็นถึงลักษณะของ Programming Pendant ของหุ่นยนต์ยี่ห้อ Yaskawa ซึ่งเราจะเห็นว่าบน Programming Pendent นั้น จะมีรายละเอียดและปุ่มต่างๆมากมาย ซึ่งในการใช้งานนั้นก็ขึ้นอยู่กับระดับของผู้ปฏิบัติว่ามีการปกป้องระดับของผู้ใช้งานไว้อย่างไร โดยปกติแล้วบริษัทผู้ผลิตก็จะมีการตั้งค่ามาให้แล้ว เช่น จากตัวอย่างเป็นของ Yaskawa จะมีการตั้งค่าระดับของผู้ใช้งานอยู่ 3 ระดับ ซึ่งในแต่ละระดับก็จะมีการตั้งค่ารหัสผ่านไว้ เพื่อเป็นการปกป้องการใช้งานปุ่มต่างๆ บน Programming Pendant ประกอบด้วย
- ระดับ Operator : ผู้ใช้งานระดับ Operator คือ กลุ่มผู้ใช้งานทั่วไปที่ไม่เกี่ยวข้องการเขียนโปรแกรมหุ่นยนต์ผู้ใช้งานระดับนี้จะสามารถใช้งาน Programming Pendant ได้ในเบื้องต้นเท่านั้น อาทิเช่น การสั่ง Start / Stop โปรแกรม และดูการทำงานของโปรแกรม ไม่สามารถแก้ไขหรือกดปุ่มบางปุ่มได้ โดยผู้ใช้ระดับนี้ไม่ต้องใช้รหัสผ่านในการใช้งาน
- ระดับ Editor : ผู้ใช้งานระดับ Editor คือกลุ่มผู้ใช้งานที่ได้รับสิทธิ์ในการเปลี่ยนแปลงแก้ไขโปแกรมการทำงานของหุ่นยนต์ได้ และยังสามารถทำการเขียนโปรแกรมการทำงานของหุ่นยนต์ สามารถใช้งานปุ่มคำสั่งต่างๆ บน Programming Pendant ได้ แต่จะไม่สามารถเข้าถึงการเปลี่ยนแปลง Parameter ของตัวหุ่นยนต์ได้ ผู้ใช้กลุ่มนี้จะได้รับรหัสผ่านและต้องใช้รหัสผ่านในการเปิดใช้งาน Programming Pendant ระดับ Editor
- ระดับ Management : ผู้ใช้งานระดับ Management เป็นกลุ่มผู้ใช้งานที่ได้รับสิทธิ์ให้สามารถดำเนินการต่างๆ ที่เกี่ยวข้องกับระบบการควบคุมหุ่นยนต์ได้ทั้งหมด โดยปกติแล้วกลุ่มผู้ใช้งานระดับนี้ เมื่อหุ่นยนต์ถูกใช้งานอยู่ในโรงงานและจะมีผู้สามารถเข้าถึงได้เพียงไม่กี่คนเท่านั้น เนื่องจากระดับนี้ถือเป็นระดับผู้ใช้งานที่จะต้องทำการรักษาความลับรวมไปถึงต้องดูแลให้หุ่นยนต์ทำงานได้อย่างมีประสิทธิภาพมากที่สุด ผู้ใช้กลุ่มนี้จะได้รับรหัสผ่านและต้องใช้รหัสผ่านในการเปิดใช้งาน Programming Pendant ระดับ Management ซึ่งจะเป็นรหัสผ่านที่ไม่เหมือนกับระดับ Editor
จากที่กล่าวมานั้นเมื่อเราจำเป็นต้องใช้งาน Programming Pendant เราเองก็ต้องพิจารณาด้วยว่าเราเป็นผู้ใช้งานอยู่ในระดับใด เพราะไม่เช่นนั้น เราอาจจะเกิดความสงสัยในระหว่างการใช้งานว่าทำไมถึงไม่สามารถใช้งาน หรือเข้าถึงฟังก์ชั่นและคำสั่งที่เราต้องการได้ โดยเมื่อเราเปิดใช้งานระบบในครั้งแรกหรือในขณะที่ระบบกำลังทำงานอยู่เราสามารถที่จะตรวจสอบสถานะระดับกลุ่มผู้ใช้งานได้โดยข้อมูลสถานะระดับผู้ใช้งานนั้นจะถูกแสดงในรูปแบบสัญลักษณ์ อยู่บนหน้าจอแสดงผลของ Programming Pendant นั่นเอง
รายละเอียดเบื้องต้นบนอุปกรณ์ควบคุมและโปรแกรมหุ่นยนต์
(Programming Pendent Detail)
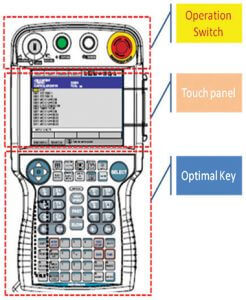
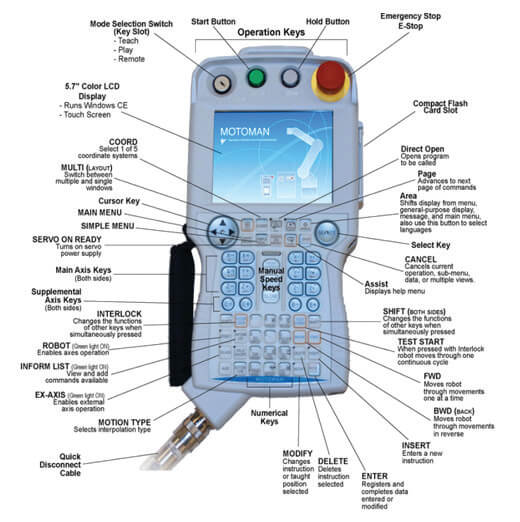
ในหัวข้อนี้จะนำเสนอให้ทุกท่านได้ทราบถึงส่วนประกอบและหน้าที่ของปุ่มกดต่างๆ บน Programming Pendant เบื้องต้นว่าประกอบไปด้วยอะไรและมีหน้าอะไรบ้าง ทั้งนี้ เพื่อเป็นพื้นฐานความรู้ในเบื้องต้นสำหรับผู้ที่กำลังจะเริ่มใช้งาน โดยจะขอยกตัวอย่าง Programming Pendant ของหุ่นยนต์ยี่ห้อ Yaskawa มาประกอบการอธิบายเพื่อให้เกิดความเข้าใจมากยิ่งขึ้น ดังรูปที่ 4
จากรูปที่4เป็นการแสดงให้เห็นถึงองค์ประกอบของ Programming Pendant โดยแบ่งองค์เป็น 3 ส่วนหลักๆ ดังนี้
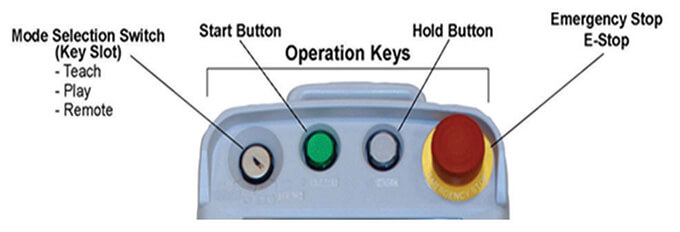
1. Operation Switch : องค์ประกอบส่วนนี้จะประกอบไปด้วยสวิตช์ต่างที่มีหน้าที่ในการควบคุมการทำงานของหุ่นยนต์หลังจากที่เรามีการโปรแกรมการทำงานเสร็จเรียบร้อยแล้ว อาทิสวิทช์เลือกโหมดการควบคุมการทำงาน,สวิทช์ Start/Stop, Emergency Switch, Holding Switch เป็นต้น ดังตัวอย่างในรูปที่ 5
รูปที่ 4 : องค์ประกอบ Programming Pendant
รูปที่ 5 : Operation Switch บน Programming Pendant ยี่ห้อ Yaskawa
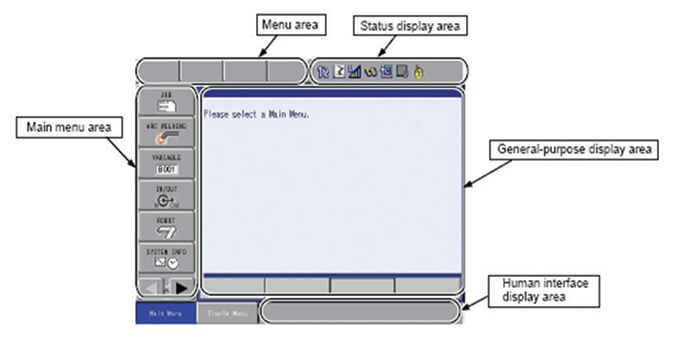
2. Touch Panel : หรือเราอาจเรียกว่าหน้าจอแสดงผล (Display) ก็ได้ ส่วนนี้จะเป็นส่วนของพื้นที่ในการแสดงผลรายละเอียดของโปรแกรมตามที่ User ต้องการ และยังเป็นพื้นที่สำหรับทำการเขียนโปรแกรมและแก้ไขโปรแกรมพร้อมทั้งแสดงการทำงานของโปแกรมอีกด้วย ในปัจจุบันด้วยเทคโนโลยีที่มีความก้าวหน้าหน้าจอแสดงผลของ Programming Pendant จึงได้รับการพัฒนาให้เป็นแบบหน้าจอ Touch Screen เราจึงเรียกว่า Touch panel โดยจะมีลักษณะคล้ายๆ กับหน้าจอคอมพิวเตอร์ กล่าวคือ บนหน้าจอจะมีปุ่มสำหรับกดผ่านบานหน้าจอและมีเมนูฟังก์ชั่นต่างๆ ให้เราสามารถใช้งานได้อย่างสะดวกอีกด้วย
ดังตัวอย่างในรูปที่ 6
รูปที่ 6 : รายละเอียดของ Touch Panel บน Programming Pendant ยี่ห้อ Yaskawa
3. Optimal Key : ปุ่มกดต่างๆ สำหรับควบคุมหรือสั่งการหุ่นยนต์ให้เกิดการเคลื่อนและปุ่มฟังก์ชั่นพิเศษเกี่ยวกับการควบคุมและการโปรแกรมหุ่นยนต์แล้วไปถึงปุ่มสำหรับป้อนค่าตัวเลขต่างๆ ในส่วนของปุ่มกด Optimal Key เราจะใช้ในการควบคุมให้หุ่นยนต์เกิดการเคลื่อนที่ไปยังตำแหน่งต่างๆ ในขณะที่เราทำการโปรแกรมหุ่นยนต์หรือที่เรียกกันว่า Teaching และยังสามารถระบุความเร็วให้ในการเคลื่อนที่ของตัวหุ่นในขณะที่ทำการโปแกรมผ่านปุ่ม Manual Speed ได้ โดยOptimal Key บน Programming Pendant ของหุ่นยนต์แต่ละยี่ห้อก็จะมีหน้าตาและรายละเอียดที่แตกต่างกันออกไป ทั้งนี้ ขึ้นอยู่กับบริษัทผู้ผลิตในการสร้างและพัฒนาฟังก์ชั่นพิเศษสำหรับการโปรแกรมหุ่นยนต์ ซึ่งก็ถือเป็นจุดขายของแต่ละยี่ห้อนั่นเอง ดังตัวอย่างที่แสดงในรูปที่ 7
รูปที่ 7 : รายละเอียดของของ Optimal Key
และรายละเอียดโดยรวมของ Programming Pendant ยี่ห้อ Yaskawa
จากที่กล่าวมาข้างต้นนั้น เป็นการแสดงให้เห็นถึงความสำคัญและรายละเอียดต่างๆ ของ Programming Pendent ซึ่งถือว่ามีความสำคัญค่อนข้างสูง เพราะจะเห็นได้ว่าในการควบคุมการเคลื่อนให้หุ่นยนต์เคลื่อนไปยังตำแหน่งต่างๆ รวมไปถึงการโปรแกรมการทำงานของหุ่นยนต์จะต้องอาศัย Programming Pendant เป็นสำคัญ แต่อย่างที่ได้บอกไปแล้วในข้างต้นว่า Programming Pendant ของหุ่นยนต์แต่ละยี่ห้อนั้นก็จะมีรายละเอียดที่แตกต่างกันออกไป และรายละเอียดฟังก์ชั่นการใช้งานเองก็มีค่อนข้างมาก ซึ่งในการใช้งานตามหน้างานจริงแล้วอาจไม่ได้มีการใช้งานในทุกๆ ฟังก์ชั่นเสมอไป ทั้งนี้ จากข้อมูลในเบื้องต้นเป็นการนำเสนอให้เห็นภาพรวมเท่านั้น เพื่อให้เกิดความเข้าใจในองค์ประกอบอย่างง่าย ดังนั้น ในการใช้งาน Programming Pendant จึงควรศึกษาควบคู่กับคู่มือการใช้งาน Programming Pendant ของหุ่นยนต์ที่เราใช้งานด้วยจะดีที่สุด




ไม่มีความคิดเห็น:
แสดงความคิดเห็น